>とりあえずプログラムを作ってみましょう。
まず、VisualC++を起動します。
デスクトップにショートカットアイコンは出来ていないはずです。
場所はインストールしたフォルダ(普通はC:\Program Files)の中の
Microsoft Visual Studio 10.0\Common7\IDE\VCExpress.exe
です。
起動すると「スタートページ」が開くので、左の方の「新しいプロジェクト…」をクリックします。
すると新しいウィンドウが開くので、その中から
「VisualC++\Win32\Win32 コンソールアプリケーション」を選択して、
自由な名前とソリューション名を入力して「OK」を押してください。
名前が<名前を入力してください>のままだとエラーが起こります。
すると今度は「Win32アプリケーション ウィザード」が開きます。
ここで注意点です。
開いたら左のタブから「アプリケーションの設定」を押して、
「追加のオプション」の「空のプロジェクト」にチェックを入れてOKを押してください。
チェックを入れ忘れると謎のプログラムが自動生成されてしまいます。
そこまでできたらソースコードの作成に移ります。
左に「ソリューションエクスプローラー」が出ていますよね?出ていなければ上のタブ→表示で表示させてください。
表示されたらソリューションを展開します。
「ソースファイル」「ヘッダファイル」「リソースファイル」
というフォルダが出るはずです。
そのうちのソースファイルの上で右クリック→追加→新しい項目をクリックします。
今回はVisual C++の中からC++ファイル(.cpp)を選択します。名前は何でも構いません。
決まったら「追加」をクリックです。
ようやく空のソースファイルができました。
とりあえず
#include <stdio.h>
int main(){
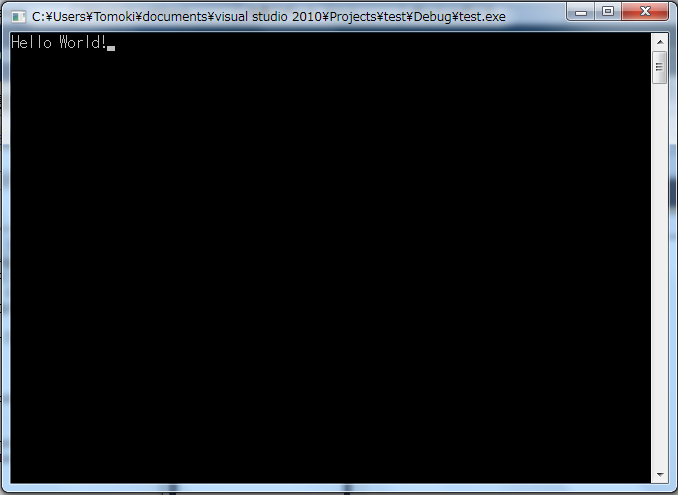
printf(“Hello World!”);
while(1);
}
と中にコピペしてみましょう。そしてF5をポチッ
写真のようになれば成功です。
プログラムの内容はあとに置いといて、
今回はここまで!
※2011/4/1追記:#includeの後のstdio.hを記述し忘れていたので修正