>一昨日、すごくテープはがしに苦労しました。
某H大学におじゃましてCNC-HAKUでロボット用の板を切ってもらったのですが、

両面テープでベトベト。
こんなのじゃ使いものにならない……
そこで、剥がそうと四苦八苦してみました!
まず最初に思ったのがお湯につけること

お湯につけてへらでゴシゴシ……
でもなかなか取れなかったです……
そ・こ・で
Google先生に教えてもらうことにしました
そして出てきた方法をいくつか試すことに。
まず試したのは消しゴム。
大した準備はいらなかったのでやってみると……全然取れない……
諦めました
次に試したのが消毒用エタノール。なんか袋入りのものです。
まぁまぁって感じでした。
でも消費量が半端じゃない……いっぱいやらなきゃいけないのにアルコールだからすぐ蒸発するんですよ。
それも15分ぐらいで5枚くらい消費してしまったので断念。

そして次に試したのがマニキュアの除光液。
もちろん僕は持ってなくて、妹も持っていなかったので、近所のJSから借りることに。
ダイソーだから買って返せる。

さわさわ……
これはなかなかすごかった。
液をカット綿に染み込ませて、両面テープの上を軽くこする作業を、ジュラルミンにヤスリがけをする時のようにひたすら繰り返す。ベトベトは残りますが、テープは取れます。
そんなnから入れなくていいです
なんか溶けてるイメージで、手がどんどんベトベトしていきますが気にしなーい。手術用のゴム手袋とか家にある人はつけたほうがいいと思います。(途中からつけました)
僕の場合200*150ぐらいのサイズだったのですが、母親に手伝ってもらいつつ作業しましたが、一枚あたり1時間弱かかりました。一人だったら2時間弱かかるんでしょう。
カット綿以外でも布やティッシュなど試してみましたが、やはりカット綿が一番良かったです。
写真は恐らくティッシュですが
そして表面のテープがとれてベタベタだけになったらもう一度消しゴムの登場です。
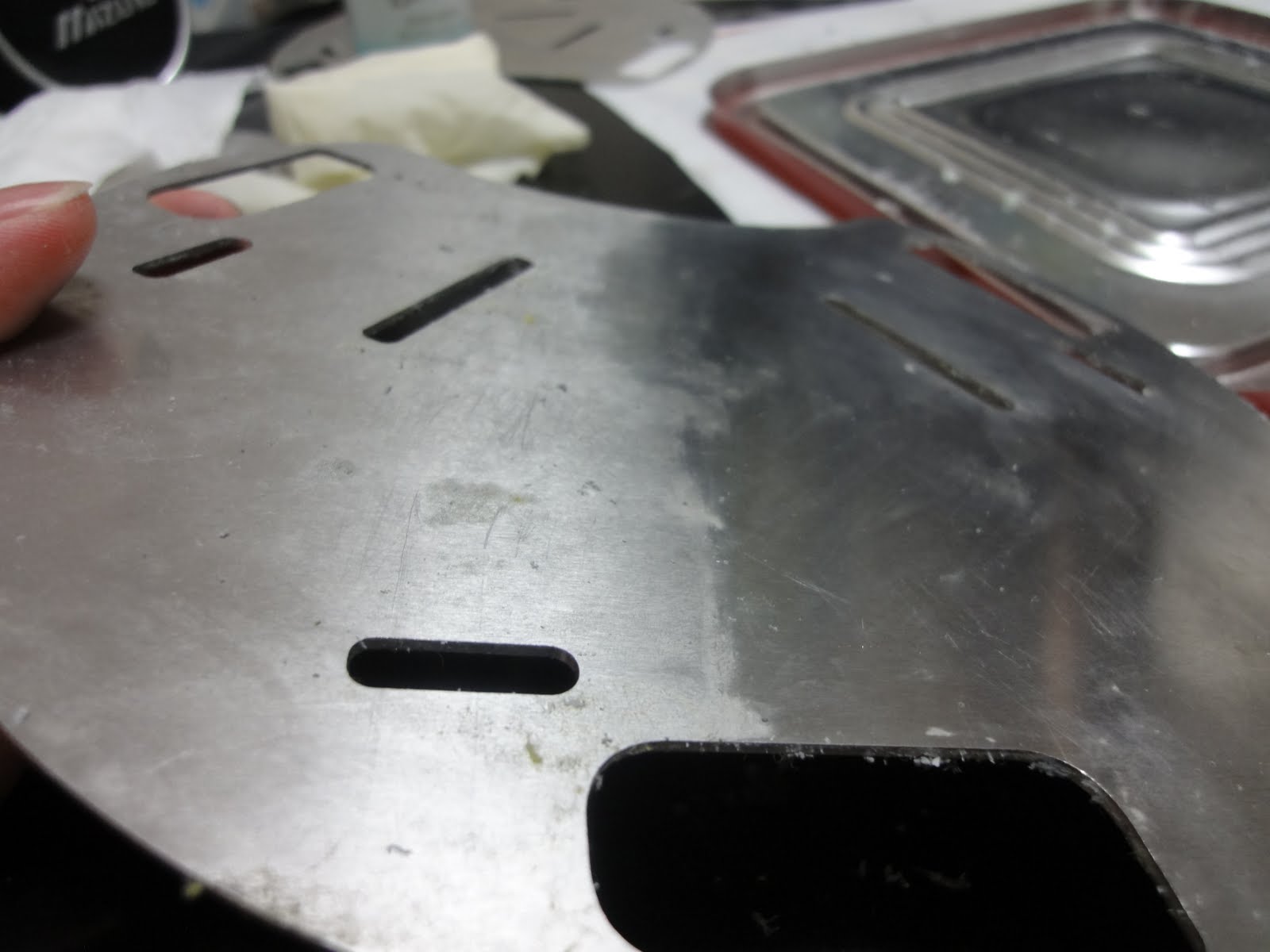
右が消しゴムを使った後、左が使う前です。
違いは一目瞭然。肌触りも全然違います。
消しゴムの犠牲は仕方ないです。けっこう力入れないといけないので(弱いと伸びる)すぐにわれます。
100均の消しゴムでは無理でした。ある程度弾力のある消しゴムのほうが良さそうです。
つまり「除光液+カット綿+消しゴム」が最強トリオでした。

